点击【下方卡片】关注我们~最新前沿资讯抢先看
开放转载,欢迎大家转发到朋友圈和微信群
可添加小编微信【13295818509】获取原文
机器人可以用于各种目的,在机器人领域的最新进展使得机器人在人类生活的许多方面都得以应用。机器人在许多领域产生了重大影响,其中,辅助和康复领域对人们的生活影响最直接。用于辅助不同感觉运动功能(如手臂、手、腿和踝关节)的主动义肢或外骨骼是辅助技术中使用的其他人机交互应用。由于生物信号能够解码人类伙伴当前状态的信息,因此在辅助技术中使用生物信号已经变得非常常见。随后,通过改变测量状态来改变信息,可以用于控制设备。然而,对于患有神经退行性疾病的人来说,义肢和外骨骼并不是一个有效的解决方案,需要另一种辅助水平和人机交互的新方式,如脑机接口(BCI)。脑机接口(BCI)系统提供了一种与外部世界通信或交互的替代方式。
2023年10月16日,米兰理工大学的Kaan Karas博士和Luca Pozzi博士及其研究团队在Scientific Reports(IF=4.6)上发表了题为“Brain-computer interface for robot control with eye artifacts for assistive applications”的文章,研究表明:脑机接口(BCI)系统提供了与外部世界进行交流或互动的另一种方式,脑电图(EEG)信号的眼睛伪影被认为是有价值的信息来源。本研究提出了一种带眼伪影的BCI机器人控制算法,为残障人士提供了改善生活质量的方法。
在本研究中,研究人员让5名受试者(男3名,女2名,年龄27±3岁)参与机器人平台控制实验。具体来说,在所有的测试过程中,受试者都被要求舒适地坐在监视器前。在每次试验开始时,受试者被告知所需的眼部伪影。在实时测试中,受试者进行了316次眨眼,82次左看,83次右看动作。随后,记录的实验数据集被输入离线算法以比较结果。
本实验选择了PAL ROBOTICS的TIAGo机器人作为机器人单元。通过ROS(Robotic Operating System)Melodic框架可以实现与机器人的通信。为了能够完全访问所有提供的功能,还在同一台计算机上安装了Ubuntu 18.04操作系统作为第二个操作系统。为了创建成功的BCI通信,需要创建一些子系统,包括事件检测算法、一个分配器用于根据事件发生的频率进一步区分多次眨眼(单次、双次或四次眨眼)、一个图形用户界面(GUI),通过该界面用户可以选择所需的任务,并且一个ROS分配器,用于实现所描述的流程与控制机器人的ROS网络之间的通信。通过考虑GUI的初始设置,分配器通过来自设备的事件向队列发送信号以切换按钮或更改页面。双次眨眼用于按下按钮以更改页面、选择物体,或者在机器人底座控制页面中前进。另一方面,横向移动用于在按钮之间移动。连续旋转用于更改突出显示的按钮。最后,连续4次眨眼用于返回上一页。为了检测双次和四次眨眼,使用了检测到的事件的虚拟时间和最新的流。算法将两次眨眼之间的时间设置为0.5秒,并且从第一次眨眼开始等待1.5秒来最终判断它是单次、双次还是四次眨眼。如果在时间范围内启动了四次眨眼,则直接向GUI发送相应的命令“返回到上一页”。本研究介绍了使用眼动神经元件进行BCI机器人控制的性能。参与者能够通过使用眼动神经元件来控制底盘运动并选择预定义的机器人任务。被试测试了机器人的所有功能,以验证整个系统的可用性。验证测试证明,开发的基于阈值的模式识别算法能够通过眼动神经元件来控制机器人。同时展示了所有被试在实时实验中检测眨眼、向左看和向右看的混淆矩阵。眼动神经元件检测算法在检测向左看方面表现不佳,并且观察到了很多将向左看错误分类为向右看的情况。然而,被试能够完成所有任务。
用于BCI的实现的GUI界面
该算法是作为脱机和实时算法设计和提出的。实时识别眼球工件扩大了这种方法在基于BCI的通信、控制、神经游戏以及实时脑电图数据处理等领域的适用性。通过设计,该算法记录了事件的视觉工件和出现时间,使研究人员能够稍后检查事件。虽然离线结果是准确的,但在在线过程中,整体精度下降了很多。原因可能是在实时的情况下对小的和不同大小的矩阵进行了滤波操作,然后它们结合起来形成一个包含100个数据点的样本。稍后,它被用于算法中。另一方面,在离线情况下,对全部记录的数据进行筛选,然后将其分成100个样本,一次一次发送到算法中。在收集了100个数据点之后,可以进行实时滤波,从而提高精度。该算法的另一个问题是,在每次横向运动后,需要等待一小部分时间来提高精度。然而,这并不代表当前应用程序的问题,因为对于机器人的基础动作,用户必须等待机器人完成每一个动作,然后再给一个新的动作,以建立机器人的感知控制。对于其他类型的应用,如神经游戏,这可能会由于反应时间的缩短而产生一些问题。不过,该实时BCI算法可以通过研究结果来控制眼工件机器人,从而提高残疾人的生活质量。
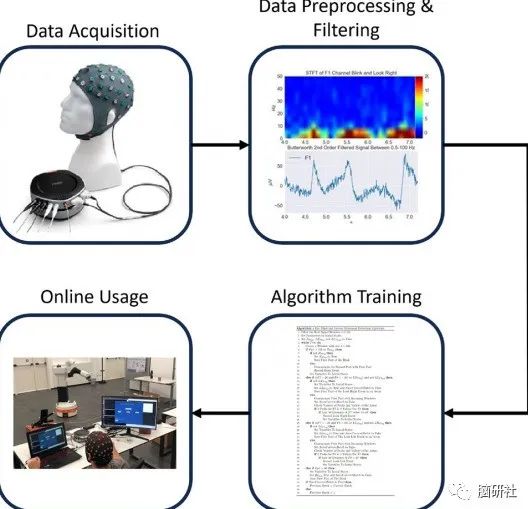
数据图和处理模式
本文提出了一种BCI机器人控制方法,通过提供辅助机器人与环境交互的方法,为残疾人提供眼器,以改善他们的生活。所开发的算法通过脑电图信号的特征形状检测眼动。研究人员提出今后的工作将是研究转让学习和元学习技术。另外,全身运动(如手臂运动)也将被考虑提高人机交互的自然性和性能。最后,将对软件优化进行研究,以尽量缩短在线计算时间,为用户提供快速、自然的人机交互接口。Karas K, Pozzi L, Pedrocchi A, Braghin F, Roveda L. Brain-computer interface for robot control with eye artifacts for assistive applications. Sci Rep. 2023 Oct 16;13(1):17512. doi: 10.1038/s41598-023-44645-y. PMID: 37845318; PMCID: PMC10579221.
https://www.nature.com/articles/s41598-023-44645-yhttps://mp.weixin.qq.com/s/wku1HfH6eTRSNkCNToD8Aw
欢迎加入前沿资讯交流群,入群方式:
添加小编微信13295818509
备注(姓名-工作单位/院校-研究方向-文献交流)
(可扫描下方二维码)

入群可免费提供文献下载服务
培训课程
数据分析业务

编译:褚 凡
校审:展琳琳
全文完
所有注明出处的文章,旨在分享、传播,如有侵权,请及时联系我们,我们将尽快处理
喜欢本文记得一键四连